OSC PIBOT framework release
As a spin-off from the Dream Club Lab project, I am delighted to share the release of OSC PIBOT, created in collaboration with Dimitris Kyriakoudis.
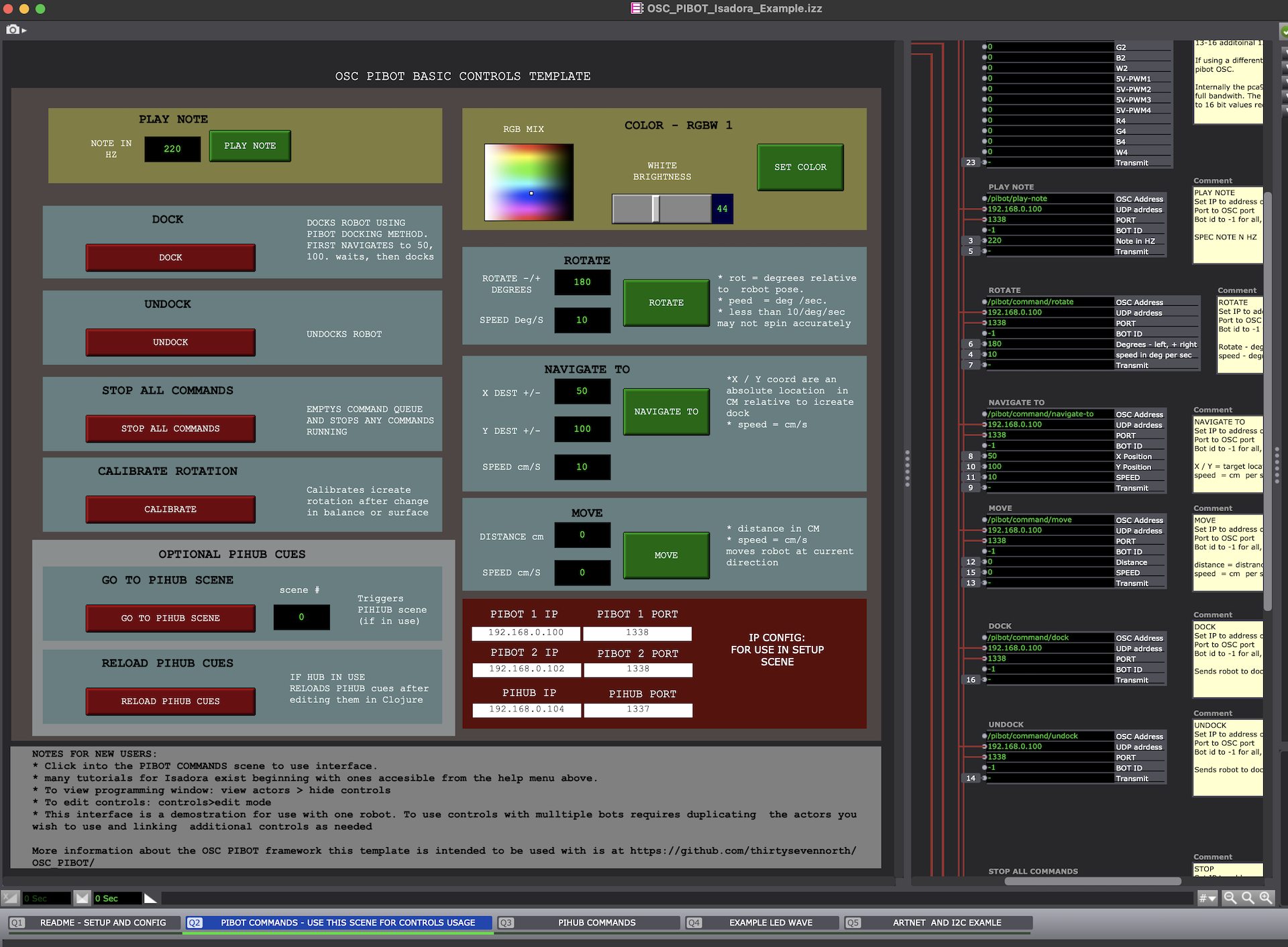
We have released OSC PIBOT as an open source framework to allow tools like Isadora and Max-MSP to use OSC (Open Sound Control) to serve as the control and choreography for robots based on either the irobot Bluetooth SDK or ROS2. It also integrates multi-channel lighting, motor, and sound control via I2C based hardware into a unified control framework.
Learn about the OSC PIBOT framework and example files for use at https://github.com/thirtysevennorth/OSC_PIBOT